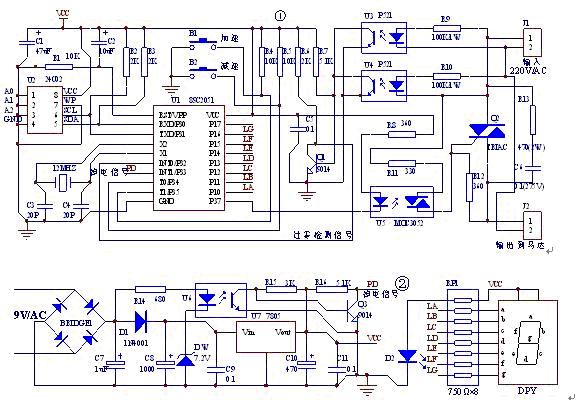
单片机89C2051控制的马达调速电路
在许多应用场合,需要随时通过调整马达的转速实现调整风量、流量等目的。过去通常采用通过调整串入马达的电感量来实现对马达转速的控制,这种方法存在成本高、灵活性差的缺点。本文介绍一种以89C2051单片机为控制核心,带数码管显示马达转速等级、用EEPROM存储转速等级参数、通过双向三端可控硅控制导通角的马达转速控制电路。
一 操作过程:加电后单片机读取EEPROM中保存的上次马达工作转速等级数据,使电机以此转速工作,数码管显示相应转速对应的数字,按轻触按钮B1可增加转速,按轻触按钮B2可降低转速,数码管显示的数字相应变化。设定的马达转速为8个等级,在数码管上显示的对应数字为1-8,1表示最低转速,8代表全速。
二 电路结构及工作过程:用单片机89C2051作整个控制器的核心部件,它以一定的周期重复扫描B1、B2轻触开关,判别有无按钮按下以及是加速还是减速按钮,并对马达实施加、减速控制;接收220V交流电的过零信号,根据过零检测信号控制可控硅的导通角;接收掉电检测电路送来的掉电信号,并将掉电前电机的转速等级写入到EEPROM,以便下次开机时读取;将电机转速等级在七段数码显示管上显示出来。
图1中U5、Q2为主构成输出交流电的导通角控制电路,U5为随机相位光隔离三端双向可控硅(TRIAC)驱动器MOC3052,它可以将低电压的逻辑电平与高压交流电隔离,为大电流三端双向可控硅(TRIAC)或闸流晶体管提供随机相位控制,单片机通过它对大电流三端双向可控硅Q2进行导通控制,实现电机的转速控制。R13和C6构成R-C消噪电路用来降低噪声电压的突变速率。
图1中U3、U4、Q1以及电阻R9和R10构成交流220V过零检测电路,当交流正玄电源电压接近0时,光耦合器U3和U4都截止,Q1完全对地导通,产生交流220V过零信号,对单片机89C2051产生外部中断INT0,单片机根据该信号,经过一定的延时后控制可控硅导通。过零信号信号每10ms产生一个。
图1中U2为I2C总线型可电擦除非易失性半导体存储器(EEPROM)AT24C02,它的存储容量为256字节,每字节可写入约100万次,写入时间最大为5ms,数据保存时间可达100年。电路用它作为电机转速数据记忆器,当检测到关机或掉电信号时,单片机将把当时转速的等级写入U2中,再次开机时,单片机将首先从U2中读出数据,并以此控制电机转速。
图2中U6、DW、Q3以及电阻R14-R16组成简单的掉电检测电路,当整流后的电源电压小于9V时,认为电源被关闭,此时光耦U6输出端截止,Q3对地导通,产生掉电信号,该信号作为单片机外部中断信号INT1,触发单片机进入掉电保护程序。
图2中DPY和阻排RP1为7段数码显示器电路,由单片机的P1口输出数据显示0-8数字,指示电机的8个转速等级。其它为电源调整电路,D2作电源指示灯。
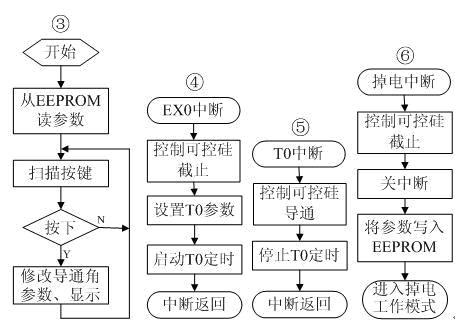
三 程序设计:该电路的控制程序相对比较简单,程序量也不很大。主要由主程序、外部中断0、定时器0中断以及掉电中断四部分构成。其中主程序完成初始化、读EEPROM、按钮扫描以及数码管显示等操作;外部中断0和定时器0中断实现对双向三端可控硅导通角的控制;掉电中断服务把数据写入EEPROM完成保存数据的工作,并将单片机设置为掉电工作模式。它们的程序流程图如图3、4、5、6所示。 孙海善
相关程序和电路,请到本站程序下
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。
