步进电机控制程序p3.3正转,p3.4反转,p3.5停止 12M 晶体步进电机接p1.0-1.3
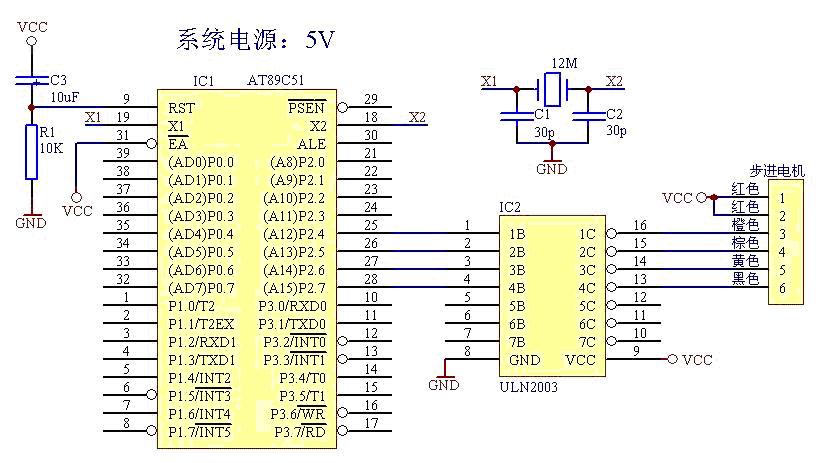 ;步进电机控制程序p3.2正转,p3.3反转,p3.4停止 12M 晶体 步进电机接
;步进电机控制程序p3.2正转,p3.3反转,p3.4停止 12M 晶体 步进电机接
实验成功 p1.0p1.1p1.2p1.3
ORG 00h
stop:
orl p1,#0ffh ;步进电机停止
loop:jnb p3.2,for2 ;如果p3.2按下正转
jnb p3.3,rev2 ;如果p3.3按下反转
jnb p3.4,stop1 ;如果p3.4按下停止
jmp loop ;反复监测键盘
for: mov r0,#00h ;正转到tab取码指针初值
for1:mov a,r0 ;取码
mov dptr,#table ;
movc a,@a+dptr
jz for ;是否到了结束码00h
cpl a ;把acc反向
mov p1,a ;输出到p1开始正转
jnb p3.4,stop1 ;如果p3.4按下停止
jnb p3.3,rev2 ;如果p3.3按下反转
call delay ;转动的速度
inc r0 ;取下一个码
jmp for1 ;继续正转
rev:mov r0,#05h ;反转到tab取码指针初值
rev1:mov a,r0
mov dptr,#table ;取码
movc a,@a+dptr
jz rev ;是否到了结束码00h
cpl a ;把acc反向
mov p1,a ;输出到p1开始反转
jnb p3.4,stop1 ;如果p3.4按下停止
jnb p3.3,rev2 ;如果p3.3按下反转
call delay ;转动的速度
inc r0 ;取下一个码
jmp rev1 ;继续反转
stop1:call delay ;按p3.4的消除抖动
jnb p3.4,$ ;p3.4放开否?
call delay ;放开消除抖动
jmp stop
for2:call delay ;按p3.2的消除抖动
jnb p3.2,$ ;p3.2放开否?
call delay ;放开消除抖动
jmp for
rev2:call delay ;按p3.3的消除抖动
jnb p3.3,$ ;p3.3放开否?
call delay ;放开消除抖动
jmp rev
delay:mov r1,#40 ;步进电机的转速20 ms 12M 晶体
d1:mov r2,#248 ;;0.500ms X 40 = 20 ms
djnz r2,$
djnz r1,d1
ret
table:
db 03h,09h,0ch,06h ;正转表0011 1001 1100 0110
db 00 ;正转结束
db 03h,06h,0ch,09h ;反转
db 00 ;反转结束
end
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。
